步进电机常规定位方式
步进电机具有固定的步距角,例如两相步进电机。步距角为 1.8 度。也就是说,控制系统的脉冲电机轴每旋转1.8度,传统的定位方法可以通过控制上位机的脉冲数来控制轴旋转的角度。结合相关机构,可以通过位置控制来实现常规定位方式。常规定位方式的组成部分一般由控制器组成。(单片机、PLC、计算机、驱动器和电机,通过编程控制器实现电机定位
步进电机的模拟定位
在一些简单的应用场景中,用户不想通过编程来实现定位控制,如电动阀门的位置控制、摄像机摄像头的远程手动调节定位等。使用PMC007系列闭环一体式步进电机,可以轻松实现步进电机的定位控制。
实现方案:
1、模拟输入
实现如下驱动控制的闭环一体机


组成如图所示。
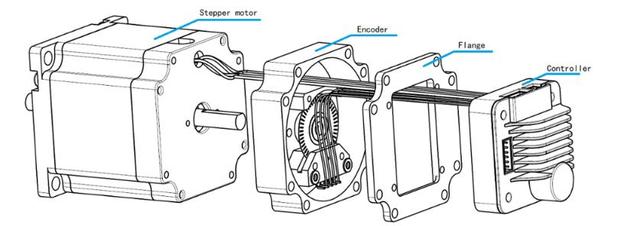
控制器带有模拟量输入口,只需接线即可实现模拟量输入。
2、模拟控制的实现:
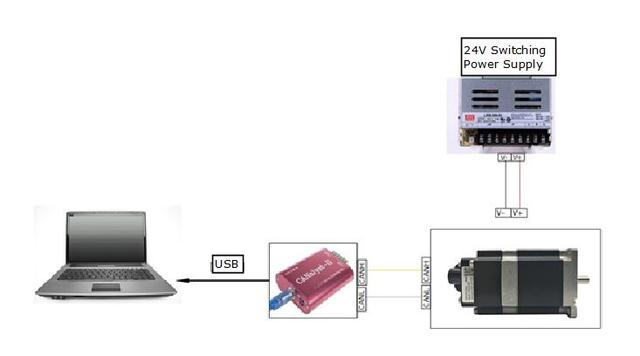
下图为控制器对象。

控制器有自己的驱动和控制功能。写在电脑上的程序可以通过以下接线离线保存:
使用自带调试工具实现模拟量离线控制程序:
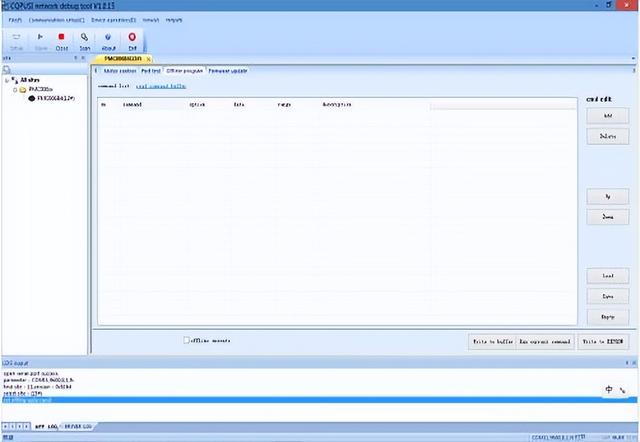
程序编译后保存在控制器中。将模拟量输入信号线接到电机电源上,即可实现电机的模拟定位。结合编码器的位置反馈功能,可以避免开环步进电机的失步问题,实现闭环控制。
*本司专业提供各种精密运动控制组件,更多知识交流,产品选型,获取产品最新报价,请直接私信小编
本文内容由互联网用户自发贡献,该文观点仅代表作者本人。本站仅提供信息存储空间服务,不拥有所有权,不承担相关法律责任。如发现本站有涉嫌抄袭侵权/违法违规的内容, 请发送邮件至 sumchina520@foxmail.com 举报,一经查实,本站将立刻删除。
如若转载,请注明出处:https://www.dasum.com/19173.html
如若转载,请注明出处:https://www.dasum.com/19173.html