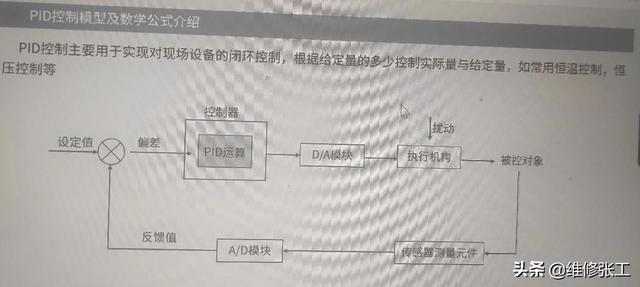
PID控制模型及数学公式介绍

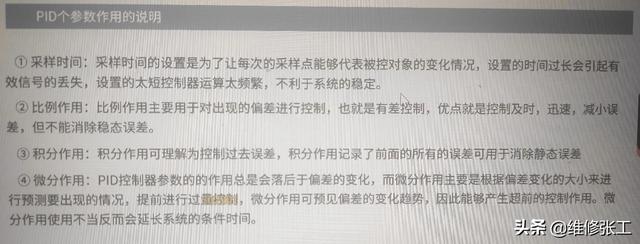
PID中的比例,积分,微分参数作用说明
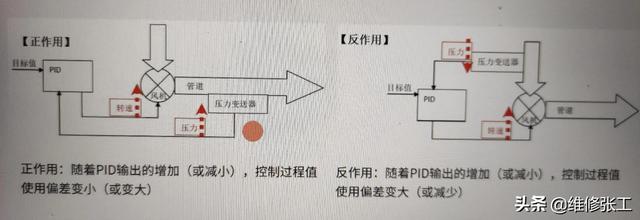
PID正作用反作用区分
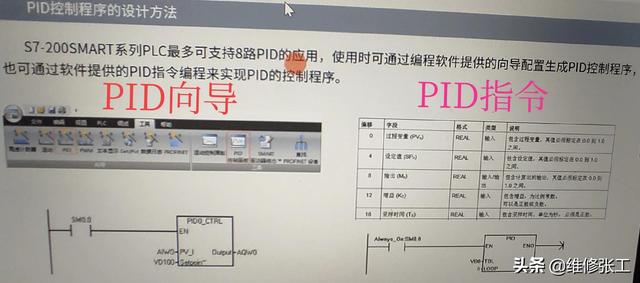
用PID控制程序的设计方法分二类:一类通软件提供PID向导,另一类用PID指令。
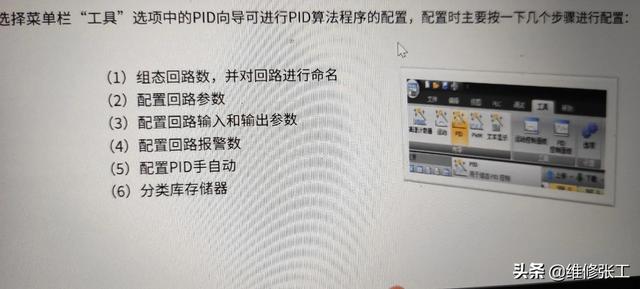
PID向导配置方法
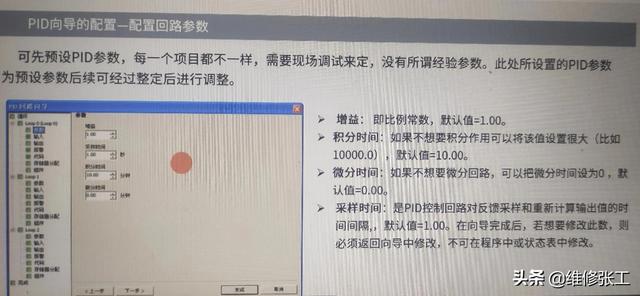
配置PID比例、积分、微分,采样时间。如果不用积分值设最大9999.9或INF,微分设为0。
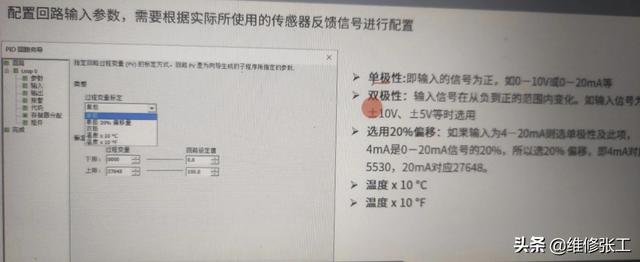
配置回路输入参数:单极性,双极性,电压,电流信号,温度信号。
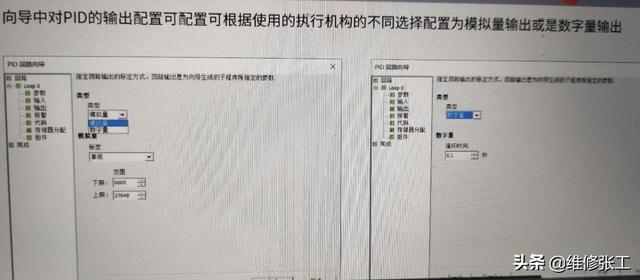
配置回路输出参数:模拟量或是数字量?数字量主要是控制温度固态继电器,模拟量是控制变频器,阀门开合度。
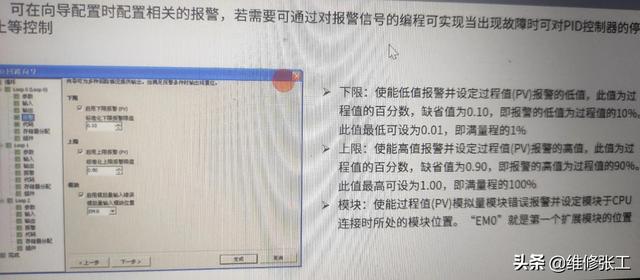
配置输入输出上限、下限,模块故障报警
配置PID手动控制

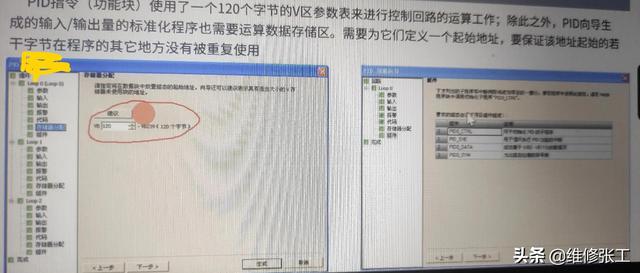
依据建议分配存储字节
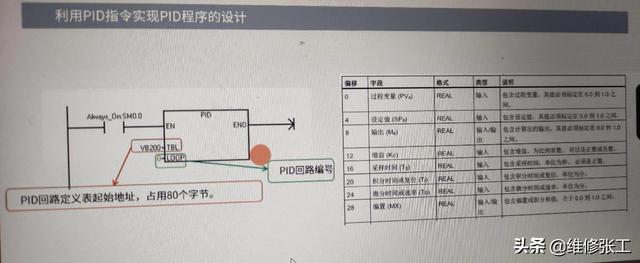
PID指令实现PID程序设计
PID指令设计PID程序分四步完成
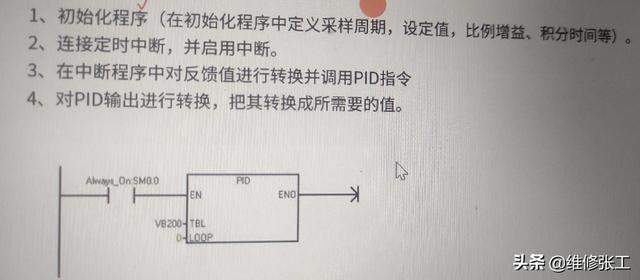
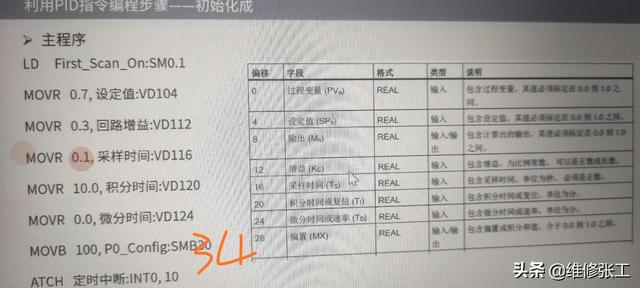
利用PID指令编程首先初始化如下参数
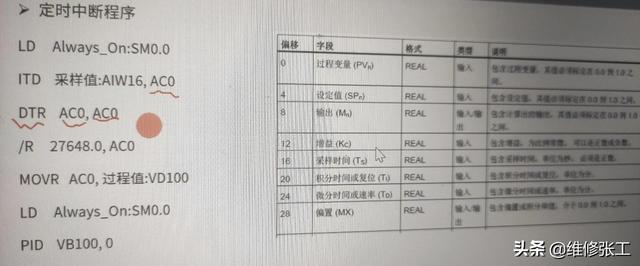
定时中断程序
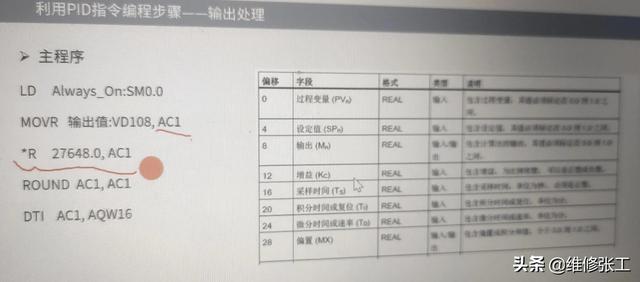
输出处理
以上是利PID向导及PID指令来实现PID编程,希望能对你有所启发。
本文内容由互联网用户自发贡献,该文观点仅代表作者本人。本站仅提供信息存储空间服务,不拥有所有权,不承担相关法律责任。如发现本站有涉嫌抄袭侵权/违法违规的内容, 请发送邮件至 sumchina520@foxmail.com 举报,一经查实,本站将立刻删除。
如若转载,请注明出处:https://www.dasum.com/37688.html
如若转载,请注明出处:https://www.dasum.com/37688.html